Une perforatrice à électro-aimant bistable
![]()
![]()
|
Une perforatrice à électro-aimant bistable
|
|
|
L'électro-aimant est l'idée qui semble souvent la plus simple lorsque l'on veut réaliser une perforatrice pour la musique de nos orgues de barbarie, car il procure naturellement le mouvement requis. Pour des supports papier c'est assez courant, mais plus rare dès qu'il s'agit de carton en raison de la puissance requise. La solution la plus triviale repose sur un électro-aimant à noyau mobile rappelé par un ressort. La force de celui-ci doit être suffisante pour extraire le poinçon de la matrice lors de la remontée mais elle s'oppose à la descente. Et le moment où cette force en opposition est maximale est précisément celui où on en a le plus besoin pour transpercer le carton ! Il y a donc un comportement assez paradoxal dans ce principe, auquel on remédie habituellement en augmentant la puissance de l'électro-aimant.
L'idée ici est de supprimer ce ressort en utilisant un électro-aimant dit "bistable" dont les 2 sens de déplacement du noyau sont actifs selon la direction du courant qui alimente la bobine. Dans un sens on descend le poinçon et lorsqu'il est en bas, il suffit d'inverser le courant pour le remonter. On dispose donc de la totalité de la puissance pour chacune des 2 actions. J'ai essayé de trouver des modèle commerciaux de ce type d'électro-aimant, mais à part ceux qui sont destinés à des verrous (trop faibles) ou quelques autres dont la disponibilité au niveau amateur est plus qu'hypothétique, on ne trouve pas grand chose. Je me suis donc lancé dans la fabrication de la chose. L'électro-aimant bistable Principe Le noyau est constitué d'un aimant permanent et il est donc polarisé. Les 2 bobines sont alimentées simultanément et produisent des champs magnétiques opposés : L'une tire le noyau pendant que l'autre le pousse et vice versa lorsque l'on inverse le courant. C'est le moment de ressortir le petit bonhomme d'Ampère ;o)
Le fonctionnement n'est pas des plus intuitifs et on aurait parfois envie que les champs des bobines ne soient pas opposés. Pour faciliter la compréhension, on peu masquer une bobine et on verra que celle qui est visible va successivement repousser puis attirer le noyau. Et il faut se dire que simultanément, l'autre bobine fait exactement l'inverse. On peut aussi dire qu'au départ d'un mouvement, l'aimant se situe à l'extérieur de la bobine qui l'attire et à l'intérieur de celle qui le repousse. Et puis une fois que l'électro-aimant est construit, c'est facile de modifier le sens des champs et de constater que... de cette manière ça fonctionne et pas de l'autre ;o) Documentation Cette réalisation est librement inspirée de ce brevet : https://patents.google.com/patent/US4533890A/en ainsi que de cette publication : Fast acting, long stroke, bistable solenoids with moving permanent magnets (Pour ceux que cela intéresse, je dispose du document IEEE complet). On y apprend en particulier que dès que l'on veut des longs déplacements, la combinaison de la répulsion magnétique et de l'attraction permettent une vitesse d'action plus élevée que l'attraction seule. Et puis pour que ce soit clair, le résultat obtenu repose sur une bonne dose d'empirisme, d'inévitables tâtonnements, ainsi qu'un "certain nombre" d'essais. Et si le dispositif présenté ici s'acquitte parfaitement de la fonction pour laquelle je l'ai destiné, je n'ai pas forcément une idée précise de la manière dont il faudrait le construire pour des puissances plus importantes, de plus grands déplacements ou que sais-je. Alors si cela vous tente, faites comme moi : essayez. Construction Note du 27-11-2025 : A l'usage il s'est avéré que bien que plus petit, l'électro-aimant de la deuxième machine était plus puissant que celui de la première ! J'ai donc repris mes calculs et pour obtenir la même puissance une nouvelle bobine a été réalisée pour la première machine, avec du fil de 0.53 mm au lieu de 0.42 mm. Par ailleurs, le nombre d'aimants du noyau a été porté à 3. Et manifestement la machine est plus performante, avec un poinçon qui ne bloque quasiment jamais.
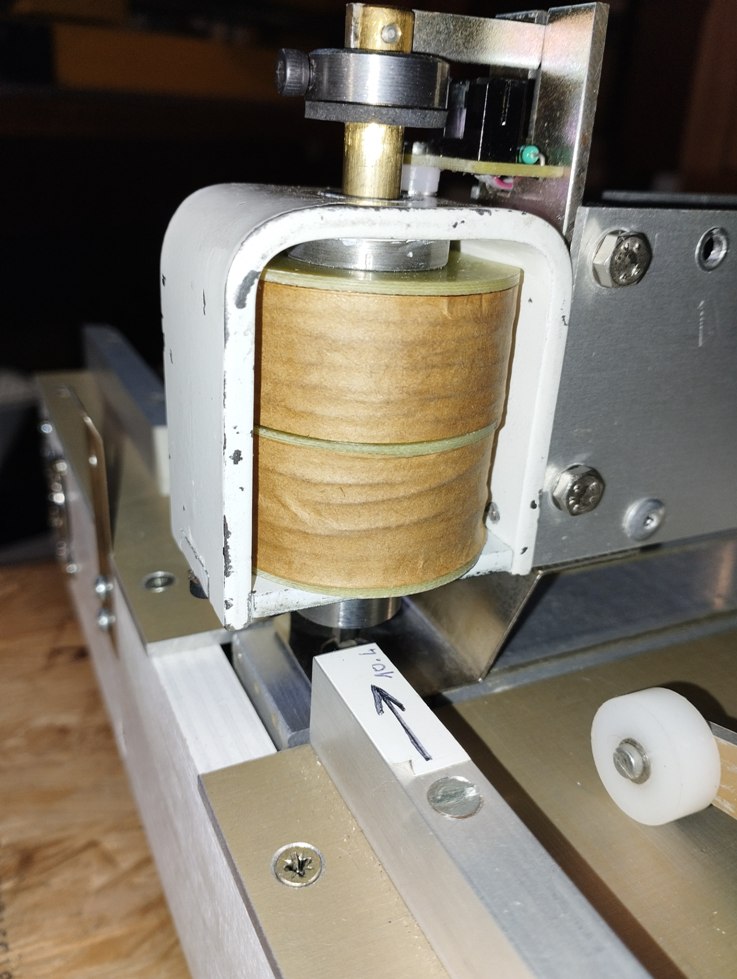
- Pour simplifier la mise en oeuvre dans la machine, le poinçon est directement porté par la tige-guide du noyau.-
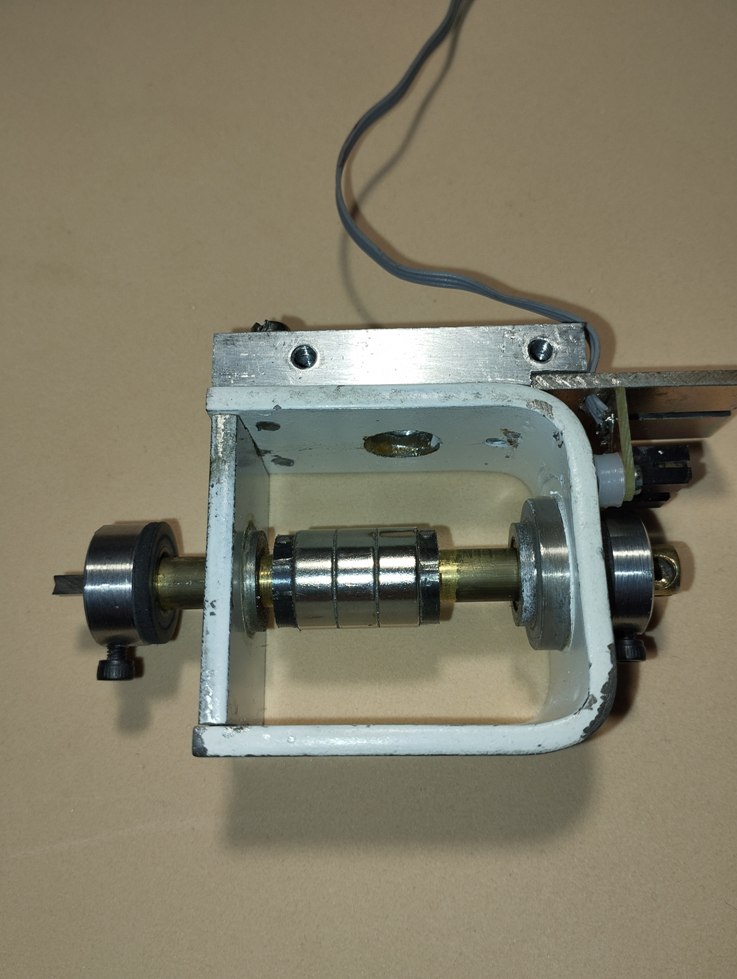
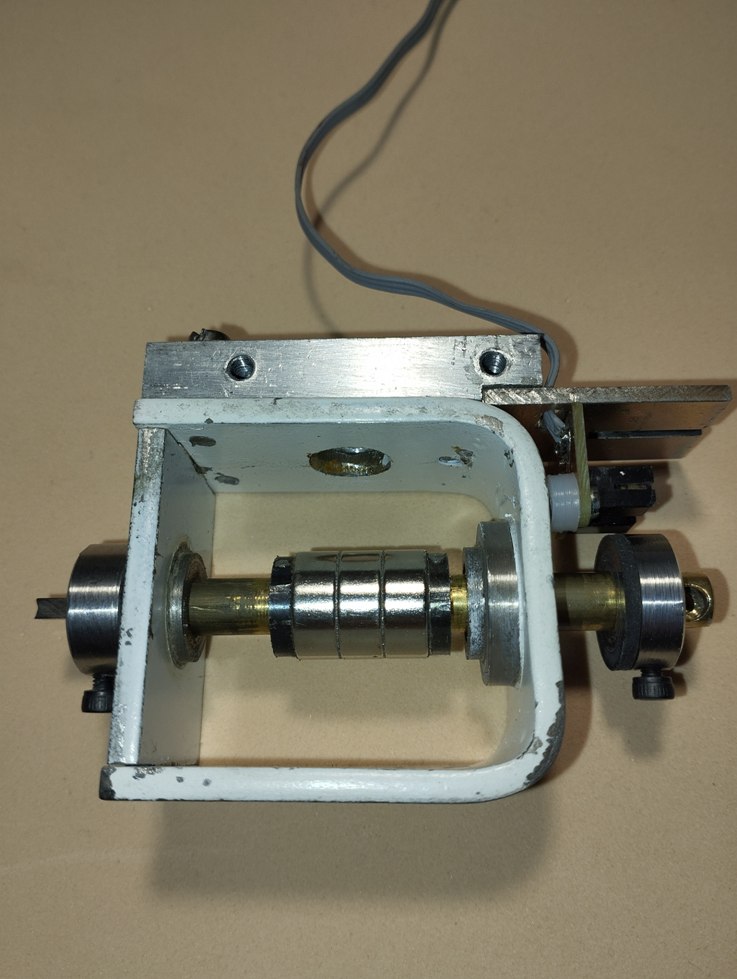
Image avec la première bobine et 2 aimants - Le noyau est composé de trois aimants néodyme en anneaux de 15x6 mm. Ils sont enfilés sur une tige en laiton de 8 mm entre 2 bagues en fer de 14x3 mm maintenues en place par des goupilles rivetées. Sa longueur totale est donc de 24 mm et sa course sera de 10 mm qui me semblent être confortable pour transpercer du carton.
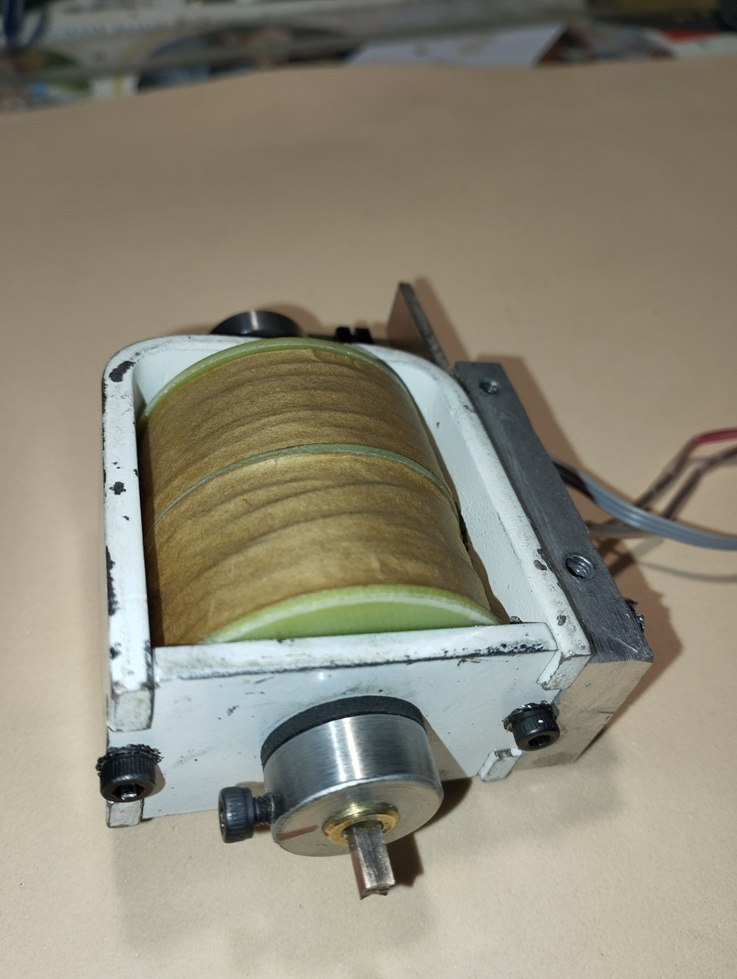
La partie mobile complète version 3 aimants et nouvelles butées, pour une masse de 95g - La bobine est composée de 2 enroulements identiques superposés. Le fil utilisé est du 58/100 (53/100 de cuivre). On a environ
600 spires par enroulement. A ce sujet, il n'est pas vraiment nécessaire de
compter les tours. Le principal est de remplir la bobine avec le plus de
fil possible. Donc on essaye, autant que faire se peu, d'enrouler à spires
jointives. Remarque : Cette bobine doit être solide car mécaniquement, elle
constitue l'un des points d'application des forces qui s'exercent sur le noyau.
Sur l'une de mes bobines d'essai les joues d'extrémité se sont arrachées sous la
poussée des spires. A toutes fins utiles, voici quelques cotes relevées sur la pièce que j'ai réalisée.
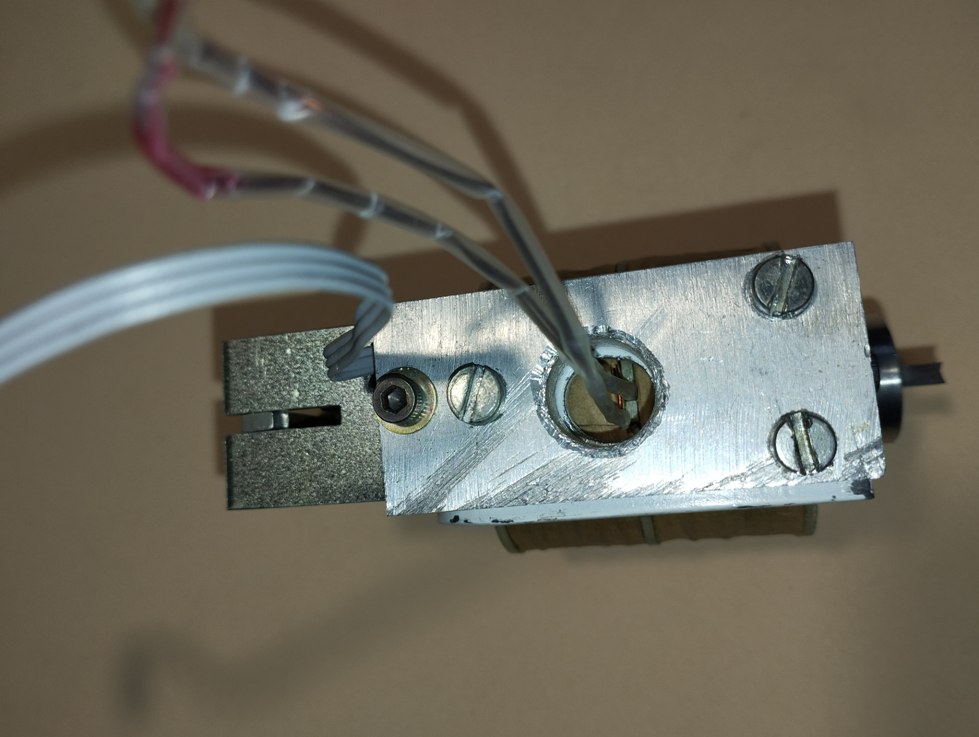
Il est impératif : - Que le circuit magnétique soit fermé. D'où l'armature en fer plat de section 30x4 mm, qu'il n'est d'ailleurs pas des plus facile de cintrer correctement quand on ne dispose que d'un simple étau. Après plusieurs ratages et moyennant quelques astuces, j'ai fini par obtenir quelques chose de pas trop mal. - Que la tige-guide du noyau soit constituée d'un matériau non magnétique, faute de quoi les lignes de champ sont court-circuitées par cette tige et la puissance mécanique obtenue est dérisoire. Je ne suis pas certain que le mariage du laiton qui coulisse dans du bronze soit des plus heureux. S'il faut refaire, j'essayerai une tige en inox, mais ce sera sans doute plus difficile d'y réaliser le logement carré du poinçon. - D'empêcher le noyau de coller aux extrémités car le champ produit pas les bobines est alors insuffisant pour s'opposer à celui des aimants au collage. D'où un espace de 2 mm à chaque extrémité procuré par des rondelles en EPDM (accessoires de plomberie) montés à l'extérieur et qui jouent également le rôle d'amortisseurs.
Le noyau dans ses 2 positions extrèmes. Remarquer l'espace de 2 mm entre l'extrémité du noyau et le bout intérieur du palier
Le nouvel électro-aimant prêt à remettre en place sur la tête Butées : A l'occasion de la reprise de la machine lors de la
fabrication de la deuxième bobine avec du fil de 0.53, j'en ai profité pour
essayer de régler le problème de l'usure rapide des amortisseurs haut et bas en EPDM. Avec
un diamètre de 14 mm, la force par unité de surface appliquée sur l'amortisseur
était trop importante et le détruisait rapidement (en 2 ou 3 cartons). Compromis. Toute cette histoire est avant tout une affaire de compromis, entre ce qu'il faudrait dans l'idéal et ce dont on dispose ou dont le coût est raisonnable, ou de ce que l'on est effectivement capable de réaliser.
Fournitures
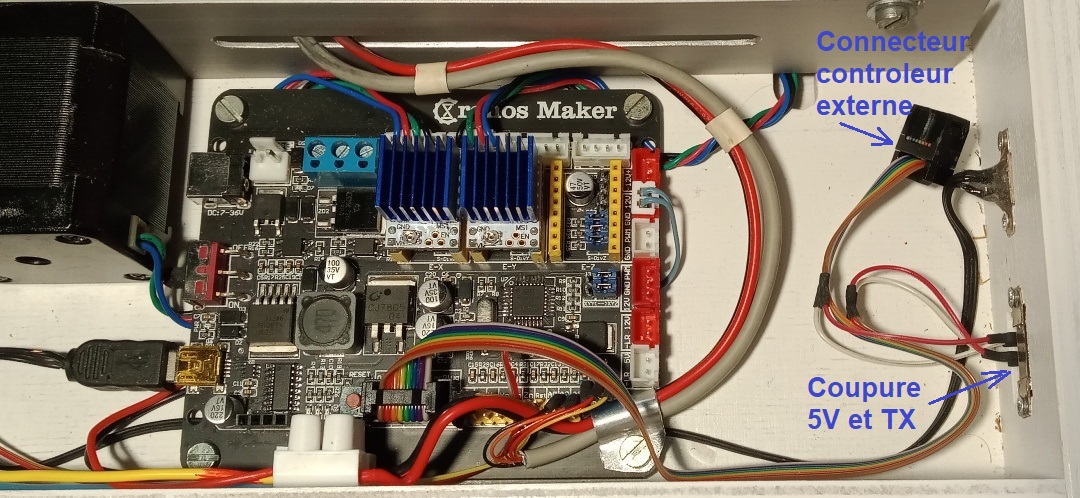
Contrôle du relais Il est facilité par l'emploi d'un module type "IBT-2" initialement destiné à la commande des moteurs de traction en modélisme (il en existe d'autres). Il comporte un pont en H à base de deux BTN7960 pouvant passer jusqu'à 50 A sous 27 V max. Débarrassé de son radiateur inutile ici, il trouve facilement sa place dans la tête. Son contrôle est simplissime et au départ j'avais mis un double monostable 74LS221. Ceci étant, une petite arduino Nano permet d'effectuer ce travail de manière un peu plus agile, d'effectuer un contrôle de cycle, d'optimiser l'utilisation de l'énergie et donc in fine de limiter l'échauffement. La machine proprement dite Après la perforatrice laser, on pourrait résumer par : "On prend les mêmes et on recommence". C'est la même idée de n'utiliser quasiment que du matériel disponible commercialement, à commencer par la carte de commande en version Grbl 1.1. Ce type de carte supporte donc le mode laser ($32 = 1) ce qui va permettre de commander le poinçon sans la moindre modification du firmware Grbl standard, simplement en utilisant la sortie PWM activée sur chaque G1. En résumé : Avec G0 X Y on bouge et avec G1 Z on perce. Attention à bien choisir une carte Grbl 8 bits et non une carte 32 bits ! Faute de quoi, la mise à jour de Grbl nécessaire pour autoriser le homing sur un seul axe sera impossible. Les nouvelles cartes 32 bits, parfois moins onéreuses, ne conviennent absolument pas. La construction s'effectue de manière modulaire, ces unités étant ensuite montées dans un coffret en contreplaqué de 12 mm qui sert de chassis.
Les moteurs On me les a donnés (merci Guy B.) mais ils ne portent pas le moindre
marquage. Ils sont au format Nema 17 avec une longueur de 48 mm et des
enroulements de 1.8 Ohms. Il est possible que ce soient des Rattm 17HS8401. La tête de perforation En forme de "C" comme habituellement, elle porte l'électro-aimant à sa partie supérieure. Essentiellement c'est une "boite" de 29 mm de large, faite de tôle d'alu de 2 mm assemblée par collage à l'époxy puis rivetage sur du profilé de 25x12 mm en U pendant que la colle prend. La rigidité est excellente et la masse totale est tout juste inférieure à 1 kg.
Le poinçon est un tronçon de barre d'acier HSS au cobalt de section 3x3 mm (outils de tour). La matrice est constituée d'un assemblage de 4 morceaux de la même barre maintenus par serrage dans une pièce en alu en forme de "U". Comme sur ma première machine quoi.
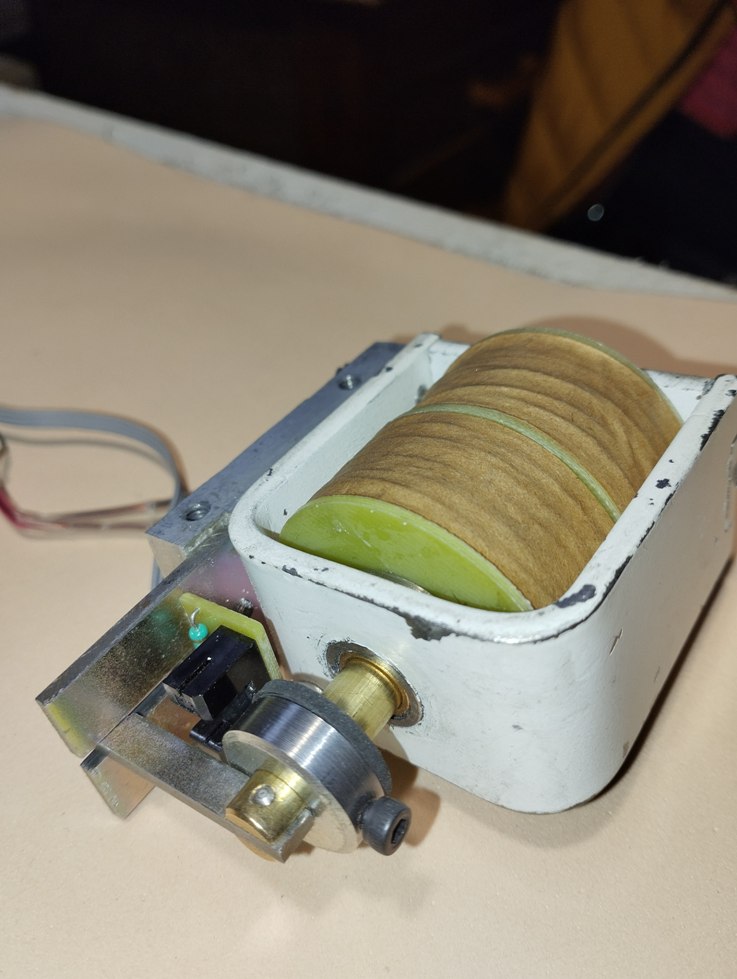
Elle renferme le module IBT2 ainsi que l'arduino Nano qui lui est associée. Comme le poinçon est carré, une tige coulissante supérieure empêche le noyau de tourner et effectue également le masquage d'une fourche optique qui détermine le moment où le carton est traversé. Le schéma Eagle de la cartelette arduino peut être téléchargé
ici.
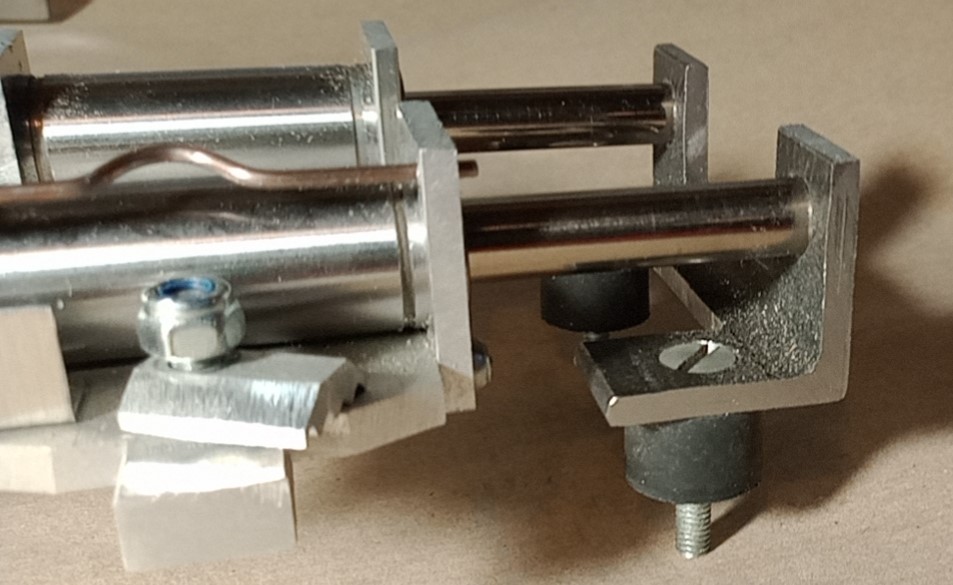
Le guidage de la tête Il s'agit essentiellement d'un chariot équipé de 2 douilles à billes de longueur 45 mm, qui coulissent sur 2 barres de 8 mm. La tête est montée de manière à ce que son centre de gravité tombe au milieu de ce chariot.
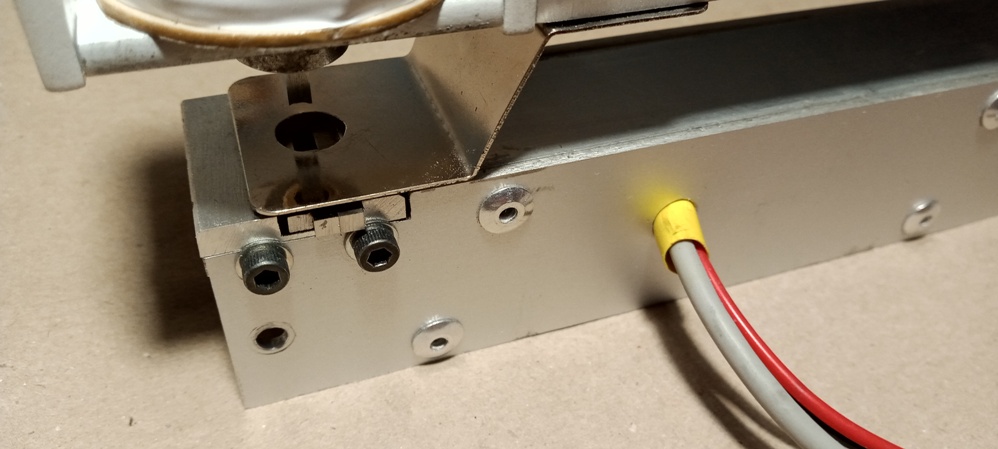
Amortissement Le déplacement de la tête (axe X) La photo parle d'elle-même...
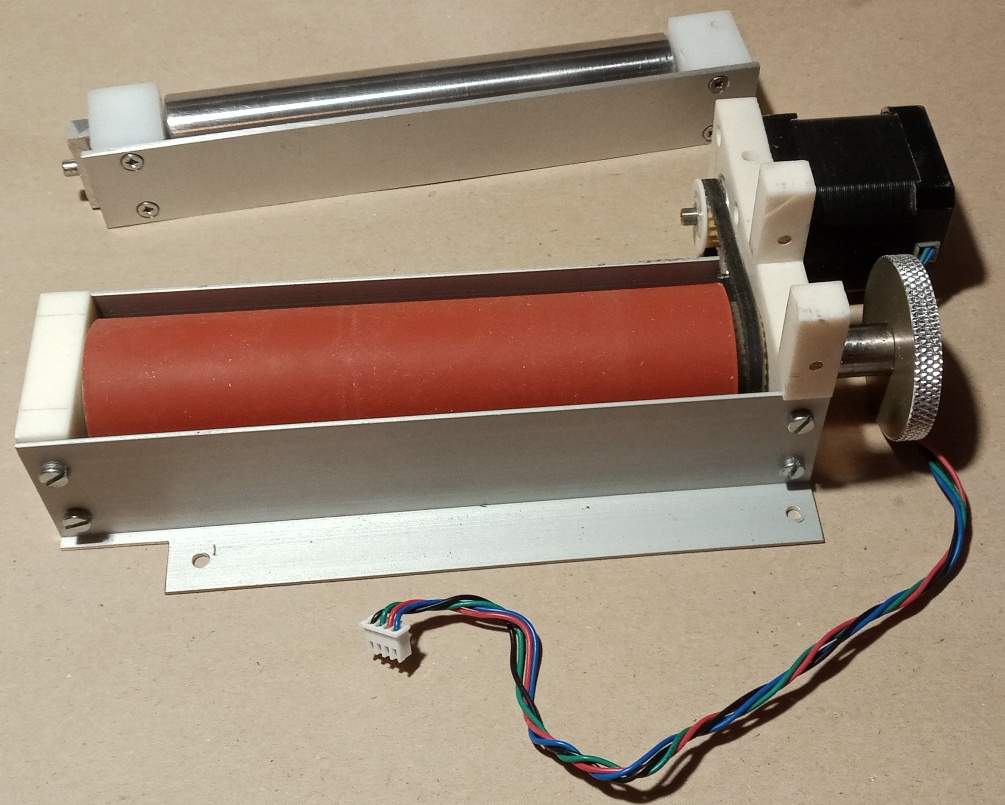
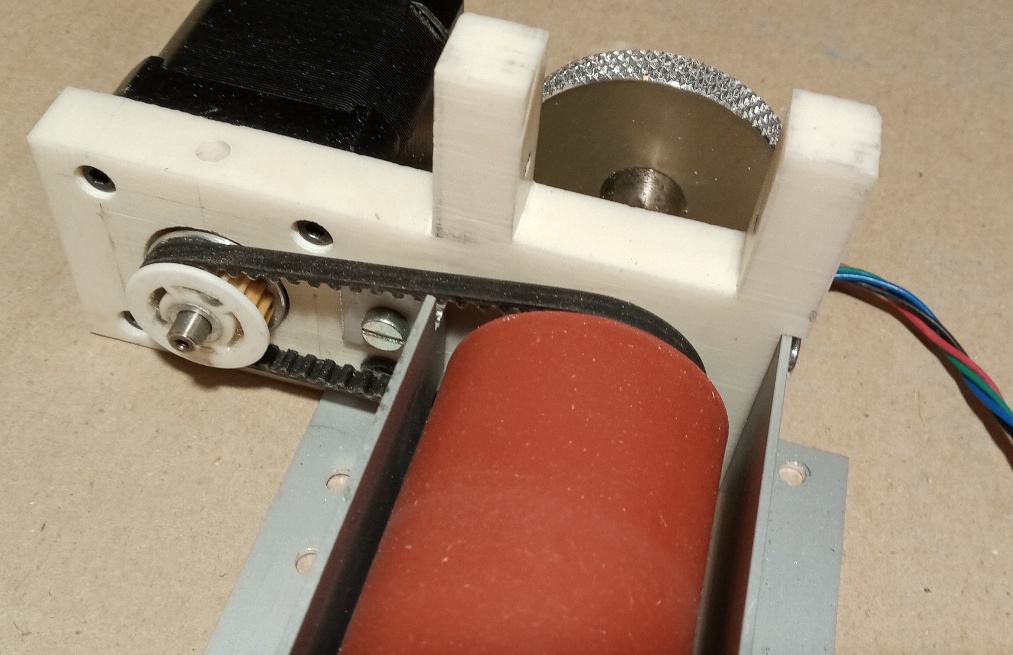
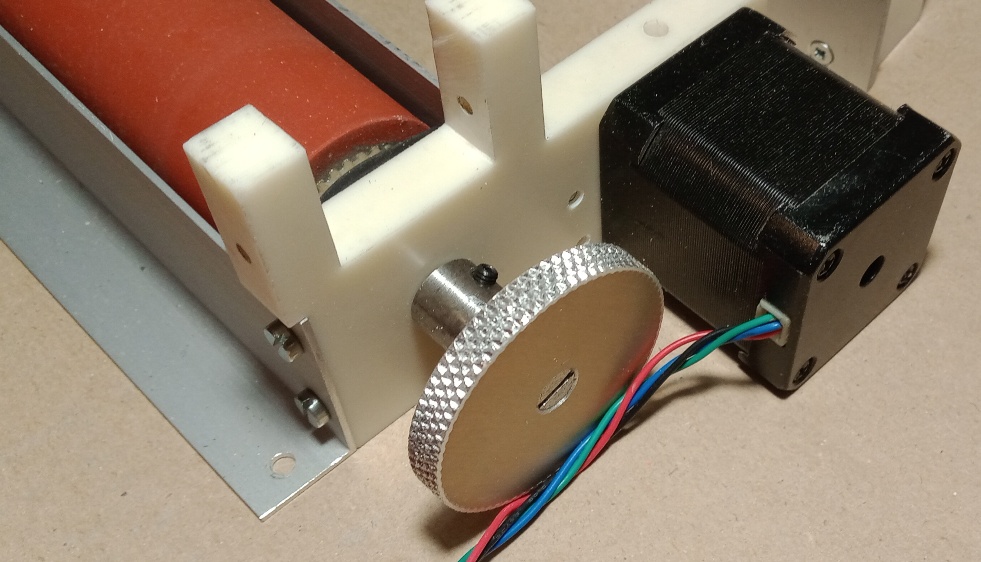
L'avance carton (axe Y) Le rouleau mesure 40 mm de diamètre. Transmission par courroie sur des poulies respectivement de 20 dents côté moteur et 32 dents sur le rouleau.
L'électronique Une alimentation à découpage de 24 V - 9A et une carte Grbl 1.1 en 8 bits. L'alim a été modifiée
pour sortir 27 V de façon à fonctionner au maximum
admis par la carte IBT2, par la mise en parallèle d'une résistance sur l'une des
résistances du pont de contre-réaction.
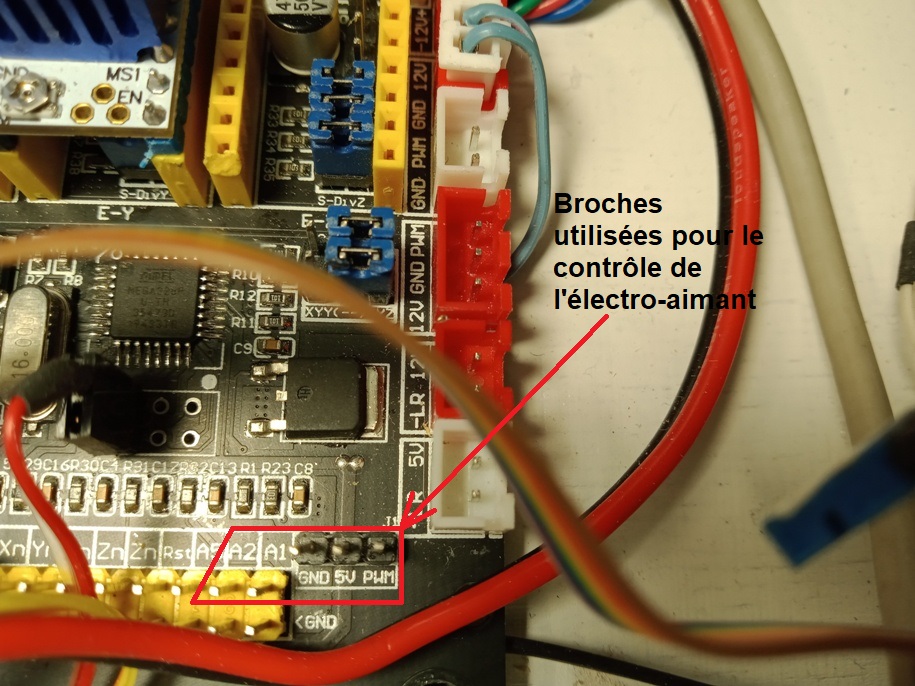
La commande proprement dite du relais est le signal PWM qui est envoyé vers l'arduino de la tête. En retour, le contrôle de cycle de celle-ci agit si nécessaire sur la carte Grbl via les broches A1 et A2, respectivement Pause et Start (vérifier leur présence). Si quelque chose se passe mal, Pause est mis à 0, avec pour effet de stopper immédiatement l'exécution du Grbl avant la commande suivante. Lorsque le défaut est levé, Pause est remis à 1 et une impulsion à 0 est envoyée sur Start qui libère l'exécution du code.
Le contrôle de cycle est la clé du fonctionnement de ce système et s'il n'est pas effectué de façon suffisamment fine, on va très rapidement être confronté à des problèmes d'échauffements. Côté tête, il se base sur l'observation de la fourche
optique en même temps qu'un chronométrage du temps de descente.
Allure générale de la commande de poinçon
Drivers de moteurs Interface Le contrôle de la machine peut s'effectuer directement par un petit logiciel maison appelé Perfo_G qui n'est autre que celui de la perfo laser désormais enrichit d'un mode poinçon (à télécharger ici). Du coup et même si ça ne sert pas à grand chose car la vraie machine est plus intéressante à regarder, on peut voir le "film" du poinçonnage sur l'écran du PC en même temps que le travail s'exécute. Le logiciel enregistre le fichier Gcode sous Mes
documents/PerfoG/temp. Ce fichier peut être envoyé tel quel par n'importe quel "Gcode sender"
et en particulier par ces petit modules autonomes
que l'on trouve dans le commerce chinois. Pour ma part j'ai réutilisé le même
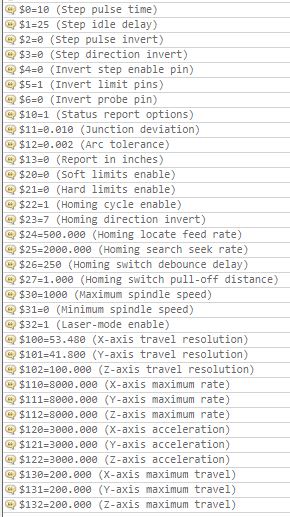
MKS TFT24 que pour la laser. Paramétrage Voici les paramètres $ de ma configuration Grbl.
Et ça marche comment ? Avec des réglages identiques pour les 3 axes : 8000 mm/mn et accélération de 3000 mm/s², à F6000 on obtient le résultat suivant.
Performances En l'absence de tout déplacement, l'électro-aimant peut effectuer 50
mouvements par seconde. Avec les paramètres de cette démo, la vitesse moyenne obtenue relevée sur un carton
complet et
en incluant bien sûr la durée des déplacements X-Y est un peu supérieure à 7
perforations par seconde. Mais ça peut aller encore bien plus vite, genre plus
de 10 trous par seconde, en moyenne. ;o) Evolution Je suis en train de faire évoluer une carte Grbl minimale 2 axes que j'avais desssinée autour d'une arduino Nano pour un traceur laser, en lui ajoutant les broches A1 et A2.
Elle pourra servir pour cette machine, dispensant de l'approvisionnement d'une carte toute faite qui s'avère être parfois assez onéreuse. |














{kind=link}