Une autre perfo à électro-aimant![]()
![]()
Une autre perfo à électro-aimant
|
|
Encore une me direz-vous ! Bon d'accord, étant donnés le peu de cartons que je perfore, j'aurais très certainement pu m'en passer de celle-là. Ceci étant... Le but était en premier lieu de vérifier la reproductibilité de la machine précédente et un système pleinement fonctionnel est certainement plus démonstratif que des suppositions. Et puis il me fallait aussi valider certaines idées du côté de l'électro-aimant et (peut-être) obtenir quelque chose de plus aboutit. Je ne vais donc pas refaire une description complète, mais avant tout pointer certaines différences et apporter des précisions qui pouvaient manquer. A l'issue de la réalisation précédente, plusieurs idées restaient en l'air :
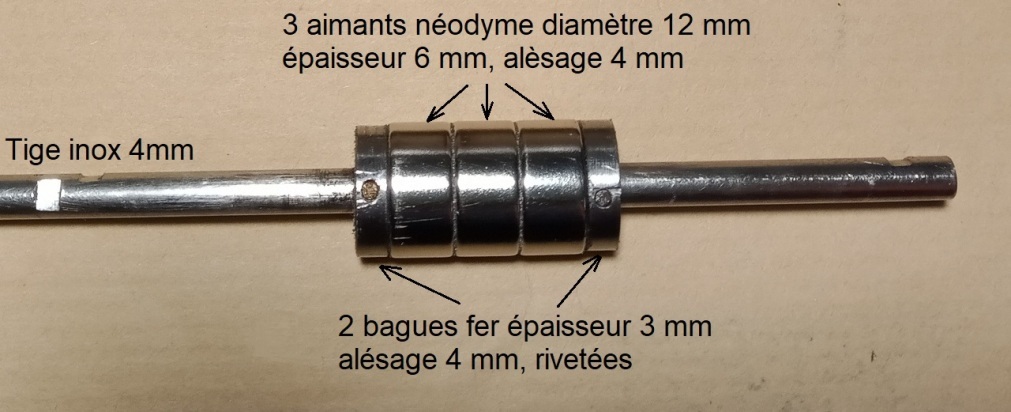
En résumé : Oui on peut réaliser 2 bobines identiques, oui on peut utiliser des aimants plus petits et oui, une tige inox va très bien. Voici quelques photos commentées et cotées de ce nouvel électro-aimant qui
sera alimenté sous 22V. L'armature est réalisée dans une sorte de fer assez maléable (doux ?) qui provient d'équerres de soutien des équipements, dans des racks de matériel électronique. Son épaisseur est de 3 mm.
Armature, noyau et positionnement des butées
La bobine et l'ensemble des éléments
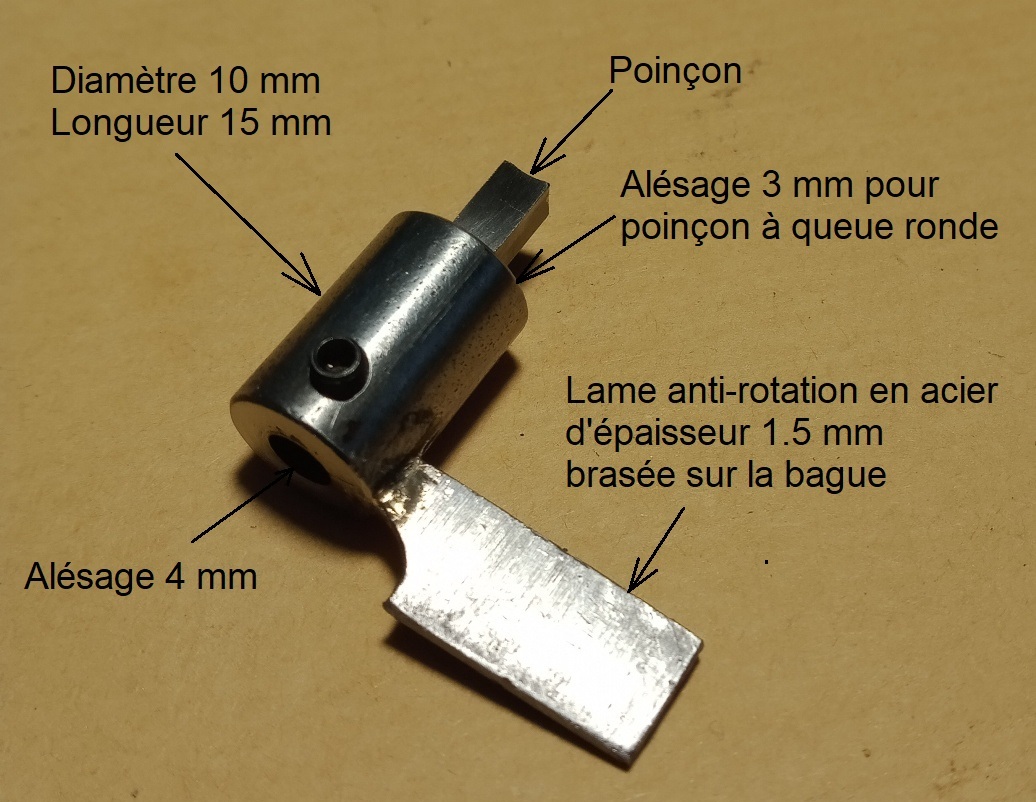
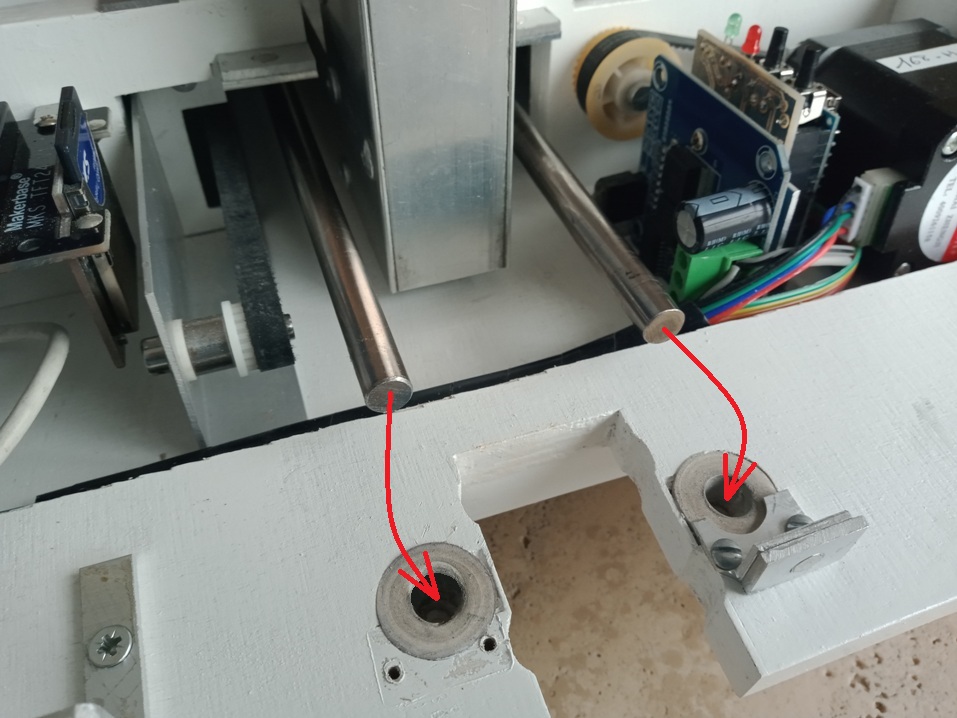
Système anti-rotation / porte poinçon et l'électro-aimant en place Concernant les paliers : Celui du haut est maintenu par 2 vis tandis que celui du bas est
simplement emboité. Pourquoi ? Et côté puissance, c'est comment ? Les cartes Grbl Quelques raisons pour lesquelles il peut être intéressant de réaliser ses propres cartes Grbl :
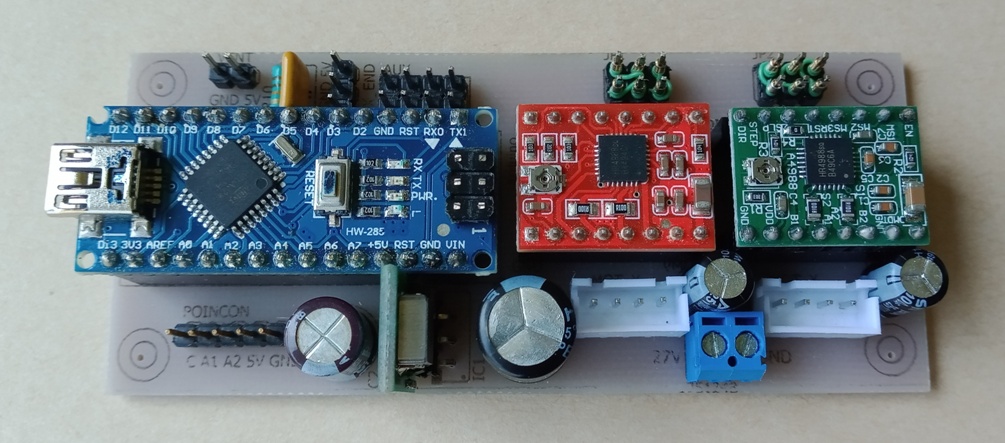
Deux cartes ont été développées autour de modules arduino Nano et conviennent indifféremment pour des machines à laser ou à poinçon. Une première carte très compacte gère 2 axes, tandis que la seconde dite "2.5 axes" peut piloter un moteur de tension papier. Ce demi-axe supplémentaire étant une réplique de Y dans le sens Y- seulement.
Les 2 cartes comportent la connectique suivante :
Ces 2 cartes ont été câblées, testées et même reproduites plusieurs fois. Donc à priori, ça fonctionne. Les CAO Eagle sont ici. Bien sûr tout peut être modifié et adapté à votre convenance. Je ne saurais toutefois que trop conseiller de ne pas supprimer les condensateurs de découplage et surtout toutes ces résistances de liaison de faibles valeurs qui peuvent sembler "inutiles". C'est ce que j'avais fait en premier lieu et j'ai obtenu une carte peu stable qui se ré-initialisait parfois au bout de quelques secondes. Alors... Précision concernant le 5V : Dans un environnement 24V (poinçon) il est hors de question de tirer le 5V derrière le régulateur de l'arduino en raison de la forte puissance que ce dernier devrait alors dissiper. Un petit convertisseur est donc implanté sur la carte. Il a le même brochage qu'un 7805 qui pourrait éventuellement convenir sous 12V (laser), à condition de le doter d'un bon radiateur. Mais le convertisseur est de loin, LA solution la plus sûre. La "sérigraphie" est obtenue par transfert au fer à repasser d'une impression à l'imprimante laser (transfert de toner) sur papier normal. C'est moins visuel qu'une vraie sérigraphie au pochoir, mais c'est tout à fait exploitable.
Voici le schéma de base d'une machine à poinçon. "De base" car cela
n'inclut pas d'éventuels accessoires comme les ventilateurs, le moteur de
tension de papier ou autres voyants. Ce schéma est établi autour d'une carte
Grbl commerciale en 8 bits, mais évidemment les cartes persos présentées au-dessus conviennent tout aussi bien.
Les deux grands consommateurs d'énergie de ce montage sont les moteurs et l'électro-aimant, avec une forte prépondérence pour ce dernier : 12 A contre 2.4 A. Il faut quand-même noter qu'il fonctionne en mode impulsionnel et de manière prévisible : En moyenne 20 ms toutes les 50 ms et de façon disjointes par rapport aux moteurs qui ne tournent pas pendant qu'il est activé et vice versa. Du coup... pourquoi ne pas baser la fourniture du supplément ponctuel d'énergie nécessaire à l'électro-aimant sur la décharge d'un condensateur qui se rechargerait pendant que les moteurs tournent ? Pour se donner un peu de marge en considérant un cycle qui durerait le double du temps moyen (40 ms) et pour une résistance R de 1.8 Ohms donnée par les 2 bobines de l'électro-aimant en parallèle, il faudrait un condensateur de 0.04/1.8 = 22000 mF. C'est déjà une belle bête, mais on est dans le réaliste. Chiche ? C'est ce que j'ai fait et ça fonctionne très bien. Je ne prétendrais pas que l'on peut généraliser ce procédé, mais en tous cas ici, avec un condensateur de 10000 mF en parallèle sur les 2000 mF existants en sortie, une alim 6 A fait parfaitement le boulot, alors qu'en théorie il faudrait 22/1.8 = 12.2 A.
Test : On met la machine sous tension puis on coupe l'inter secteur. Sans le condensateur additionnel il est possible d'effectuer une perforation, mais une seule et pas à chaque fois. Avec le condensateur on enchaîne 2 perforations successives et à la troisième, le carton n'est pas toujours traversé. En posant un voltmètre en sortie d'alim, on constate que l'on débute à 22.1V, on passe à 21 V après le premier trou, puis à 19 V après le second. Ensuite la tension s'écroule rapidement. Donc au final et malgré une alim sous-dimensionnée, on a tout de même une "réserve" pour 2 trous. ;o) Autre chose : La tension a été légèrement abaissée afin de diminuer l'échauffement de l'électro-aimant. Avec 24 V, en une demi-heure de travail, la température de la bobine avoisinait 80°C, valeur à partir de laquelle les aimants néodymes normaux commencent à perdre leur magnétisme. Sous 22 V on ne dépasse pas 60°C. Cool ! D'où le remplacement par du papier kraft, de l'isolant scotch blanc initial que la chaleur avait un peu rabougri.
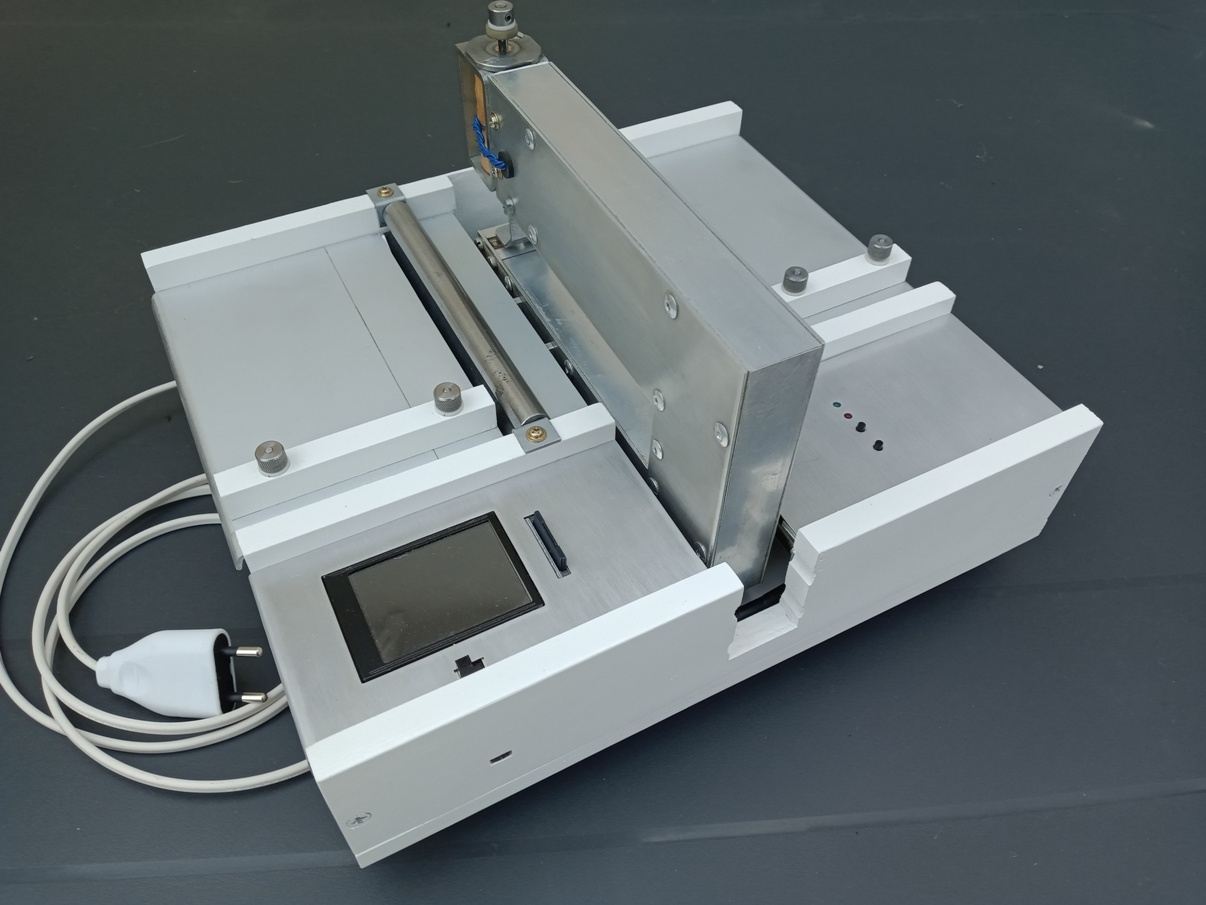
Elle est un peu plus compacte que la première et néanmoins dotée d'un système
de tension de papier qui la rend polyvalente. La base mesure 270 mm x 310 mm
pour une hauteur de 100 mm avec les pieds. Elle peut accepter du carton ou
du papier jusqu'à une largeur de 160 mm.
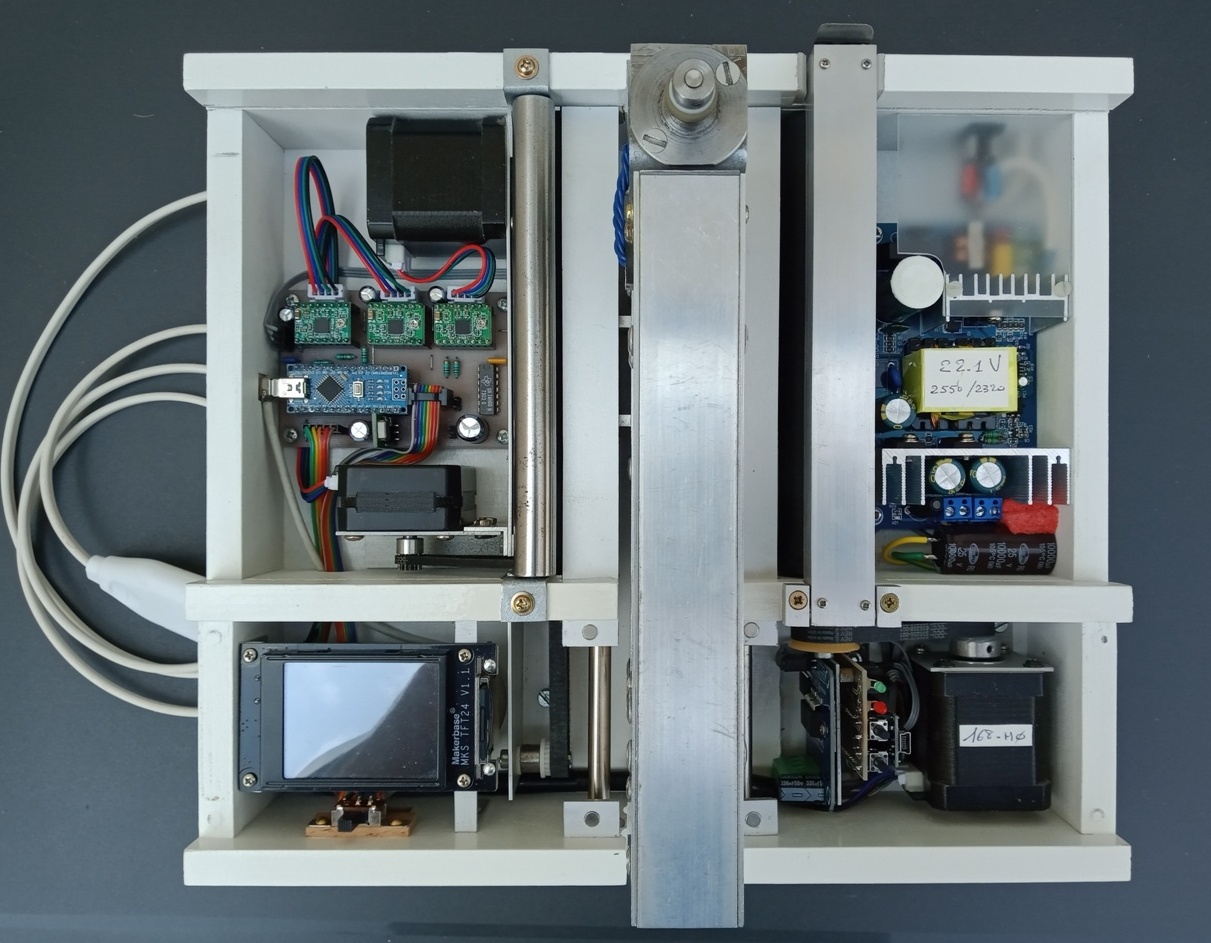
La machine terminée, une vue de dessus montrant les 4 "cavités" et la carte Grbl 2.5 axes avec les moteurs X et Y-
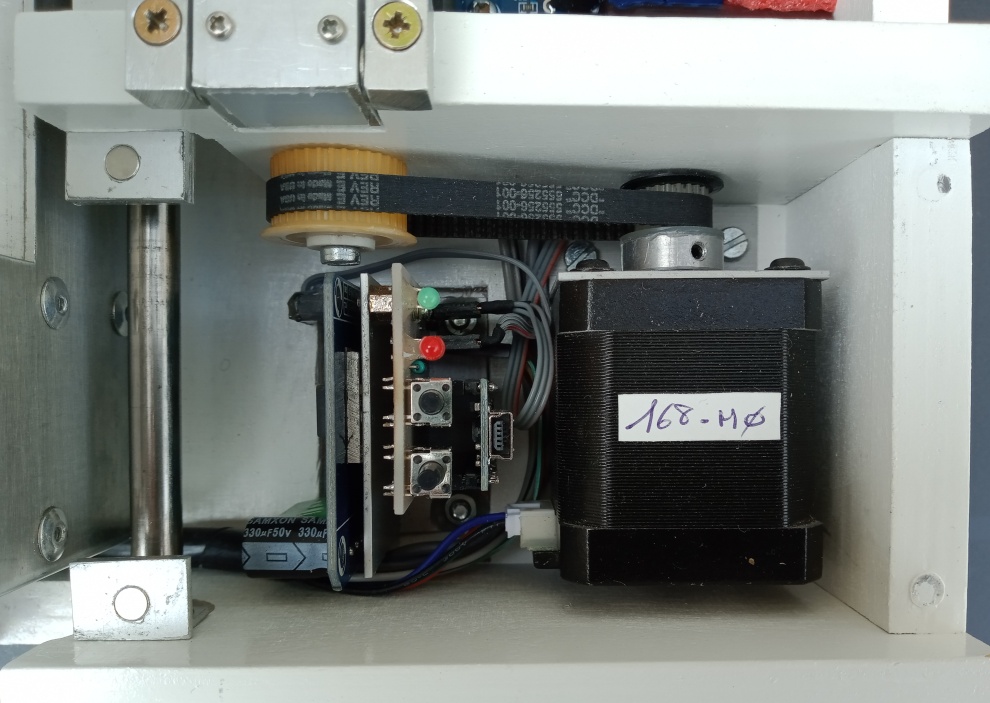
Le contrôle poinçon, le moteur Y et l'écran autonome
Evacuation des copeaux, support du guidage tête et électro-aimant en place
Précision : Il n'y a aucun ventilateur. Le seul organe qui chauffe dans cette machine est l'électro-aimant et il se trouve à l'extérieur. Les drivers de moteurs sont de simples cartelettes type Pololu à base de A4988 réglées à 1.7 A (Vref = 680 mV) pour les 2 gros moteurs. Pour ce courant, on peut se passer du radiateur à coller sur le composant. La dissipation thermique s'effectue par le dessous de la puce vers le PCB au moyen de vias thermiques soudés conformément à la datasheet et c'est très efficace. Ce radiateur ne peut guère apporter qu'une possibilité de court-circuits entre composants voisins et je parle d'expérience. Alors autant s'en passer ;o)
Voici une vidéo de cette machine en action. Avec les mêmes paramètres Grbl que ceux de la machine précédente, les performance en vitesse sont identiques pour du papier ou du carton.
On perfore du papier kraft, puis du carton de 5/10. A remarquer :
Et selon la tradition, on tire un trait et on passe à autre chose.
|













{kind=link}